Mobiler Roboter und |
Mobiles, kletterfähiges Robotersystem
für automatisierte Handhabungsaufgaben
in der Fertigung
Ziel der Arbeit war die Entwicklung eines mobilen Robotersystems für den Einsatz beim Schweißen an Großbaugruppen, wie z. B. im Schiffbau. Die Schwerpunkte lagen im Entwurf und der Realisierung des Roboterfahrzeugs, in der Automatisierung des Bearbeitungsprozesses sowie in der Entwicklung einer geeigneten Mensch-Maschine-Schnittstelle für den teleoperativen Einsatz.
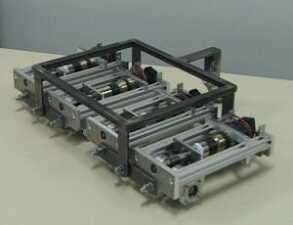
Anhand einer Kinematikanalyse wurde ein geeignetes Bewegungsprinzip für den mobilen Roboter ausgewählt. Dabei wurde insbesondere berücksichtigt, dass der Einsatz des Gerätes bei Schweißaufgaben einen möglichst gleichförmigen Bewegungsablauf erfordert. Der zu diesem Zweck gewählte Radantrieb gewährleistet neben der notwendigen Manövrierfähigkeit beim Schweißen auch die Lenkfähigkeit auf gewölbten Oberflächen. Dieses wird durch die Differentiallenkung erreicht. Sie bietet eine sehr gute Manövrierfähigkeit bei gleichzeitig geringem Steuerungsaufwand. In der Kombination mit Pendelrädern konnte zudem ein kompakter Aufbau des Fahrzeugs ermöglicht werden.
 |
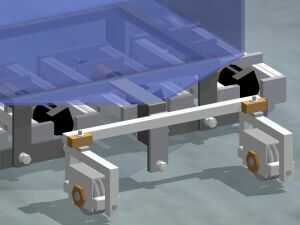 |
Da die Basisfunktion des Robotersystems auch die Kletterfähigkeit einschließt, erforderte dies die Gewährleistung der Haftkraft in allen Fahrzeuglagen bis hin zur Überkopffahrt. So wurde bei der Auslegung des Fahrwerks besonders auf die Anpassungsfähigkeit an unebene Untergründe geachtet. Jedes der entwickelten Radsysteme besteht aus einer Sandwichanordnung von Polscheiben und paramagnetischen Matrizen mit eingebetteten Magnettabletten (Permanentmagneten). Um eine möglichst große Reibung zwischen Rädern und Fahrbahn zu erzielen und um so die Haftung in allen Fahrzeuglagen zu gewährleisten, wurde darüber hinaus ein Konzept mit integrierten Reibringen entwickelt. Der mobile Roboter wurde in zahlreichen Versuchsfahrten auf seine Leistungsfähigkeit hin getestet. So wurden Fahrten und Manöver auf gewölbten Fahrbahnstrecken, Kletterfähigkeitstests in kritischen Bereichen der Fahrbahnsteigung, Überfahrten von Schweißnähten sowie Fahrten bei reduzierter Haftung durchgeführt.
 |
 |
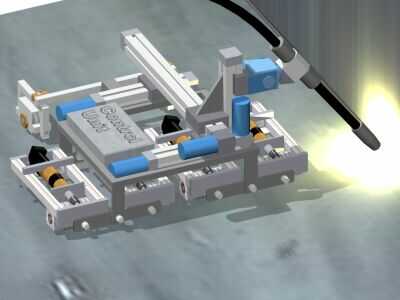
Um die volle Funktionalität beim Prozess zu erreichen, wurde ein Manipulatorsystem entwickelt. Er übernimmt die notwendigen Bewegungen, um den Brenner bei stillstehendem Fahrzeug, z. B. in Bauteilecken, zu verfahren und sorgt im Fahrbetrieb dafür, dass ungünstige Bewegungen des Fahrzeugs ausgeglichen werden, um den Schweißprozess nicht zu beeinträchtigen.
 |
 |
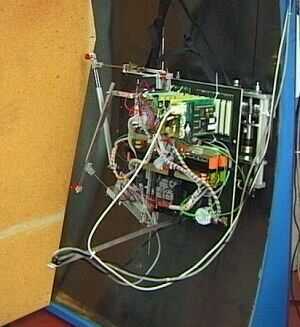
Zur Steuerung des mobilen Roboters wurde ein Konzept mit verteilter Rechenleistung entworfen. Dabei wurden die Basisaufgaben (Antriebsregelung, Regelung des Fahrverhaltens und Manipulatorregelung) auf drei Mikrocontrollersysteme verteilt, die über CAN-Bus kommunizieren. Ein weiterer Mikrocontroller übernimmt die Steuerung der Mensch-Maschine-Schnittstelle. Bei der Entwicklung der Systemarchitektur wurde insbesondere auf einen modularen Aufbau und auf eine beliebige Erweiterbarkeit Wert gelegt. Zur Erfassung seiner Umwelt und zur Kontrolle des Bearbeitungsprozesses wurde das Fahrzeug mit umfangreichen Sensoren ausgestattet. Dieses sind Laserscanner für die Abstandsmessung, taktile Bumper, Geschwindigkeitsmesser, Sensoren zur Detektion der aktuellen Fahrgestelllage und ein 3D-Videokamerasystem.
Um Bearbeitungsaufgaben weitestgehend autonom durchführen zu können, wurde ein verhaltensbasierter Kontrollansatz gewählt, dessen Grundgedanke nicht mehr auf eine komplexe Umgebungsmodellierung, sondern auf der direkten Interaktion mit der Umwelt basiert. Die direkte Verknüpfung von Sensorwerten und Reaktion lässt sich mit Reflexen in der Natur vergleichen. Dort lösen Reflexe direkt eine bestimmte Teilaufgabe aus und bewerten dabei notwendige Sensordaten. In diesem Zusammenhang war es das Ziel, Verhaltensweisen zu erzeugen, welche durch einfache Sensoren ausgelöst oder unterdrückt werden können. Bei der umgesetzten Kontrollarchitektur wird das Verhalten des Roboters nicht durch die Unterdrückung untergeordneter Prozesse, sondern durch eine Überlagerung aller Verhaltenswünsche erreicht. Dazu wurde jedem Sensorereignis eine mathematische Funktion zugeordnet, deren Maximum die für das Verhalten günstigste Motoreinstellung beschreibt. Die Funktionen wurden so gewählt, dass sich ihre Werte im Bereich zwischen Null und Eins bewegen, so dass man durch Multiplikation aller Verhaltensfunktionen und einer anschließenden Suche nach dem Maximum der Gesamtfunktion die Motoreinstellung findet, die für das Gesamtsystem optimal ist. Der Vorteil dieses Lösungsansatzes liegt darin, dass neue Verhalten modular hinzugefügt werden können, ohne dass es notwendig ist, diese Verhalten in einer bestimmten Hierarchieebene zu positionieren. Ferner entfällt durch diesen Ansatz eine aufwendige Umweltmodellierung und Wegplanung. Mit dem gewählten Steuerungskonzeptes lassen sich mit dem mobilen Roboter autonom komplexe Fahrmanöver auf beliebig geformten Flächen durchführen.
Zur Prozessüberwachung sowie als Visualisierungssystem für teleoperative Einsätze des mobilen Roboters wurde ein interaktives 3D-Videokamerasystem entwickelt. Durch eine synchrone Verstellung der Kameraausrichtung in Abhängigkeit von der Kopfbewegung des Anwenders konnte eine völlig intuitiv operierende, automatisierte Kamerasteuerung realisiert werden. Bei der Bildwiedergabe wurden insbesondere physiologische und physikalische Aspekte der stereoskopen Videotechnik einbezogen, um dem Anwender eine möglichst natürliche Sehweise des Arbeitsbereiches anbieten zu können. Durch die automatisierte Variation der Kamerakonfigurationsparameter konnten nicht nur die negativen Effekte, wie z. B. Darstellungsfehler oder Tiefenverzeichnungen, deutlich reduziert, sondern auch Zusatzfunktionen, z. B. ein Tiefenzoom, implementiert werden.
 |
 |
Den Abschluss der Arbeit bildet ein Ausblick auf mögliche Systemerweiterungen bzw. Verbesserungen des mobilen Roboters. Im Hinblick auf weitere Verbesserungen der Mensch-Maschine-Schnittstelle wurden mögliche Erweiterungen wie Bewegungsrückkopplung, Einsatz von VR-Technologie etc. vorgestellt. Mit der Realisierung des mobilen Roboters für Schweißaufgaben an Großbaugruppen wurden Grundlagen für weitere Forschungs- und Entwicklungsarbeiten geschaffen, die im Wesentlichen auf einen verhaltensbasierten Kontrollansatz zur Erfüllung konkreter Handhabungsaufgaben im Bereich der automatisierten Fertigung ausgerichtet sind.